





Automobile makers has been caught in crunch of electronic components shortage,albeit the trend of intelligent cars is irresistible. As the most instant and impressive evidence of smartness to users, the PEPS (Passive Entry and Passive Start)system is no more a high profile feature only for high end cars. It has been introduced to mid-tier or even economical models by many car makers, emerging brands in particular. In China market where EV sales witness more than 100 percent growth in the first half of 2022, major electric car makers such as BYD, GAC Aion, Geely, Nio, Xpeng and Li Auto have basically equipped all models with PEPS.

While that ECU quietly stuns us motorists, have we ever thought of probing the trail of its making and the prospect of its future? Let’s hit the road.
PEPS provides motorists with experience of securely entering the car without manually unlocking activity. The engine and HVAC system of the car can be remotely started before the driver or passengers enter the car. While all passengers leave the car, the PEPS will automatically lock the car. In this way, car users enjoy the convenience of passive entry with security reassured. That must be why we name it with the word “passive”.
Yesterday: RKE and PKE
Currently, mainstream PEPS solutions integrate wireless technologies such as Bluetooth Low Energy (BLE), NFC, RFID (High Frequency and Low Frequency) etc. Well, how do they function? It would be hard to digest if we tell story as of today. So, why don’t we flash back to yesterday?
In the end of 1990s, some high-end car models phased in a remote keyless entry (RKE) system an evolution over the earlier IMMO (immobilizer) solution based on low frequency RFID (125KHz). As a predecessor of the PEPS, the RKE has the key fob to transmit UHF(ultra- high frequency)signals to a RF receiver connected with the BCM (body control module) of the car to verify user identity. Once the ID is verified, the system will execute an open/close-door action driven by the BCM. Such a one-way verification mechanism as shown in Figure 1 can be interpret as an advance-set cipher in a spy movie. When a visiting secret agent comes to a meeting venue, he or she has to speak or show such a cipher. If the cipher is correct, he or she will be allowed in. The drawback of this mechanism is that once the enemy infiltrated and got the cipher, the venue will be instantly broken.
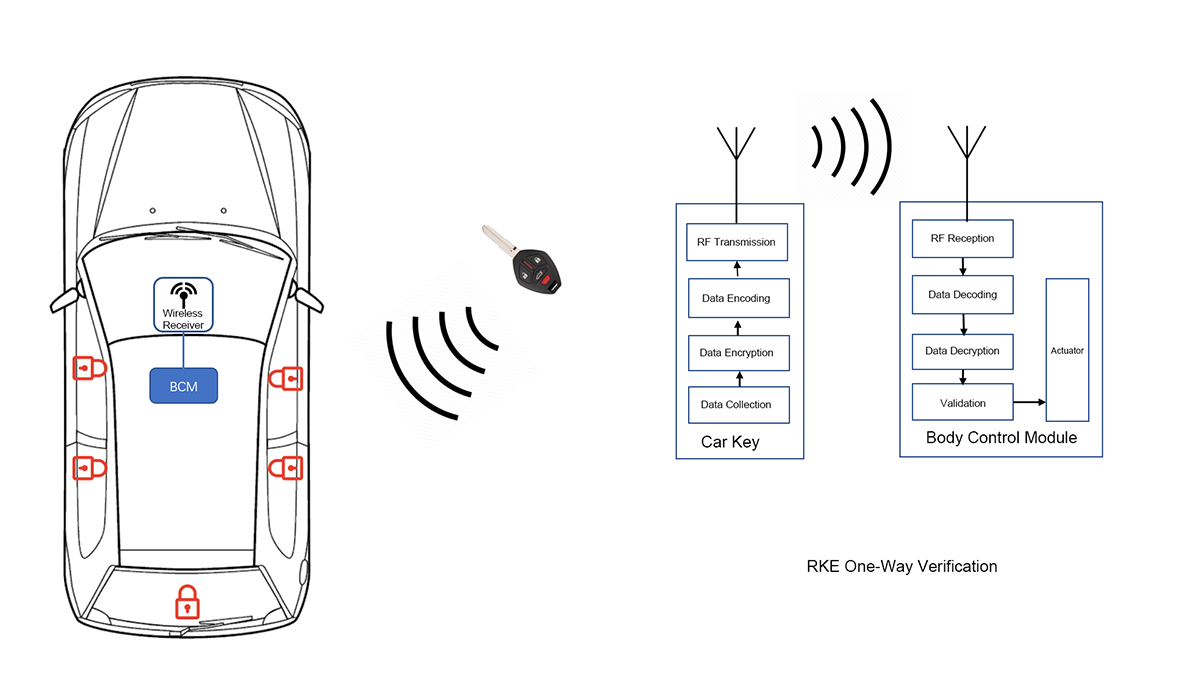
Figure 1. Working Mechanism of RKE
The RKE solution adopts frequency bands of 315 MHz (in USA, China and Japan etc.), 433.92 MHz (in Europe, China) and 868MHz (in Europe). In term of signal modulation, most countries adopt the ASK (amplitude shift keying) mode, whereas Japan adopts the FSK (frequency shift keying) mode. IC vendors such as Silicon Labs, Maxim, Microchip and NXP etc. have offerings in this field.
By early 21st century, people upgraded the one-way verification mechanism of the RKE to a two-way mechanism called the PKE (passive keyless entry) system, where the verification is no more initiated by the key fob holder i.e. the driver, instead it is initiated by a low frequency transmitter connected to the BCM. Once the doors of a car get closed and locked, a wireless module built in the car will continuously broadcast low frequency (125KHz) signals in search of a responder (built in a key fob) within a certain range. When the module found a responder, its code will wake up the latter. If the LF part of the module has not received feedback signals for a long time, it will enter the sleep mode to lower power consumption. Whenever the responder in the key fob receives a wake-up signal, it will send out a rolling encoded datagram over high frequency (i.e., 433MHz) signals. After the built-in module decodes and comprehends the datagram, it will instruct the car to actuate certain operation. Thus, we can see, compared with RKE, the verification mechanism adopted by the PKE is two-way mechanism, see Figure 2.
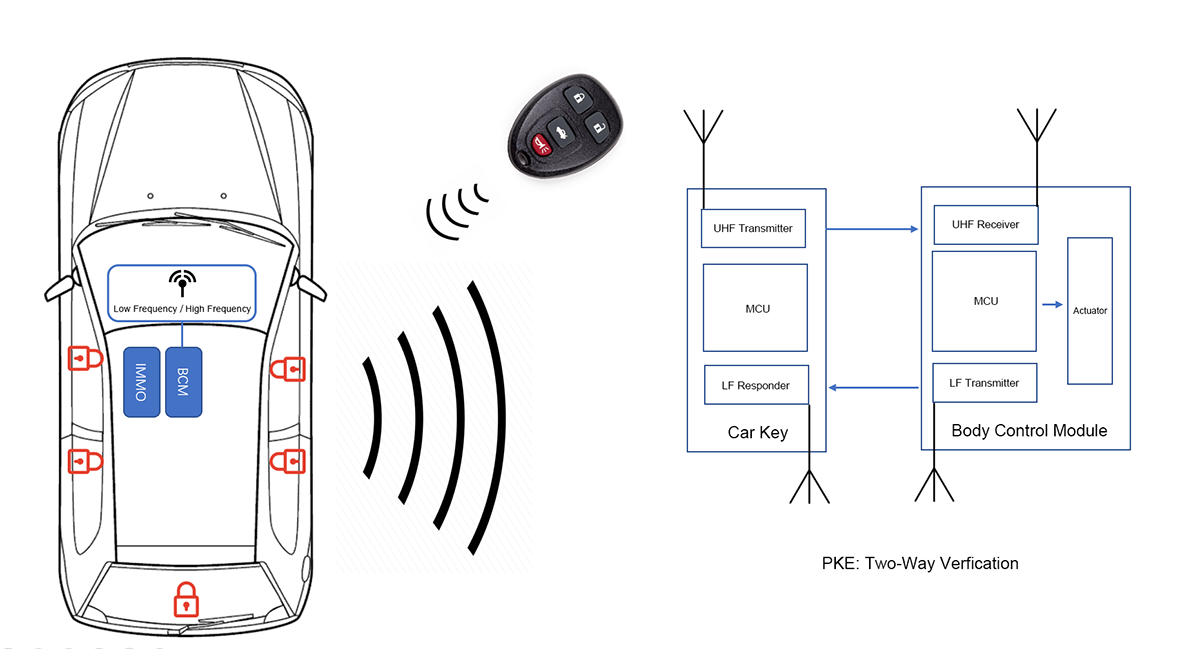
Figure 2. Working Mechanism of PKE
Today: Bluetooth PEPS is Mainstream
However, the pace of digitalization has never ceased. In the decade after the advent of early mode of PEPS, smart phones become widely adopted. Nowadays, they have become a most handy tool for identity verification in our daily life. So, car makers introduced smart phones into the PEPS scenario. Thus, the PEPS that we see today came into being.
What features have been integrated in contemporary PEPS solution? Basically, mainstream PEPS have now incorporated NFC and Bluetooth. The driver can put an NFC phone near column B of the car to enter. It removed hassle of stuck both a key fob and a smart phone into the pocket. But introducing Bluetooth into PEPS is more revolutionary. First of all, Bluetooth has 100% penetration ratio in smart phones, so users don’t have to bother which model to select for compatibility of the PEPS. Secondly, the high frequency, frequency hopping mechanism and the reinforced security mechanism of Bluetooth provide more safety and assurance compared with the UHF/LF reassurance mechanism. Furthermore, the ranging and positioning feature of the Bluetooth helps a lot for timing of open/close the door, dramatically reducing possibility of hijacking the car by following the driver. Bluetooth also makes convenient for the owner to use an App to authorize others to access or use the car, making remote car sharing among family members and friends possible. Such a mechanism also helps car rental services and mass self-driving car sharing services.
The precision level of Bluetooth ranging and positioning can reach a half meter or one meter. It comprises RSSI method and AoA method. The former which is less accurate offers a precision level of 1~5 meters. The latter which is more accurate offers a precision level of a half meter.
RSSI Technology Helps Realize Entry Level Bluetooth PEPS
RSSI (Received Signal Strength Indication) is a technology that can calculate the distance that the radio signal travels according to its degree of attenuation in the range. The system hence can work out the location with trigonometric calculation.
While the radio signal travels, its strength will attenuate after certain distance or encountering various barriers. Such attenuation occurs to different extent in different situations. It indirectly eroded the precision level of the algorithm. For that reason, the RSSI only works well in short range. As it still features inexpensive deployment and low power consumption, the RSSI is adopted for entry level Bluetooth PEPS. A most inexpensive solution only deploys one Bluetooth base station inside the column A of the car. The solution works out the distance between the user’s smart phone and the column A so as to judge whether to open or close the door. See figure 3.
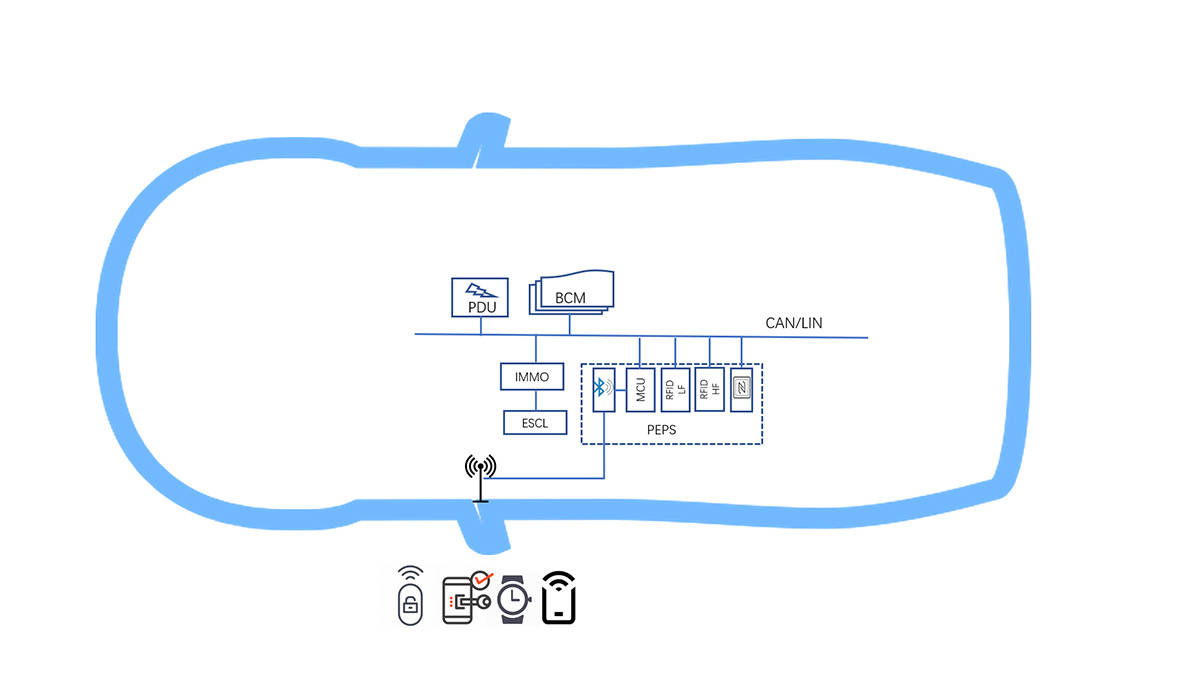
Figure 3. Entry Level Bluetooth PEPS Scheme (RSSI Single Station)
AOA Technology to Realize Mainstream PEPS
A feature called AoA (Angle of Arrival) introduced in the Bluetooth 5.1 release improved the precision level of Bluetooth positioning service. In AoA solution (see figure 4), the transmitter such as a smart phone periodically send out a special signal. An antenna array in the car is deployed to receive the signal for phase analysis so as to calculate out the angle at which the transmitter sends out the signal. With support of other survey methods and equipment, the solution can better judge the location (distance and direction) of a transmitter device with a precision level of around 0.5 meter.
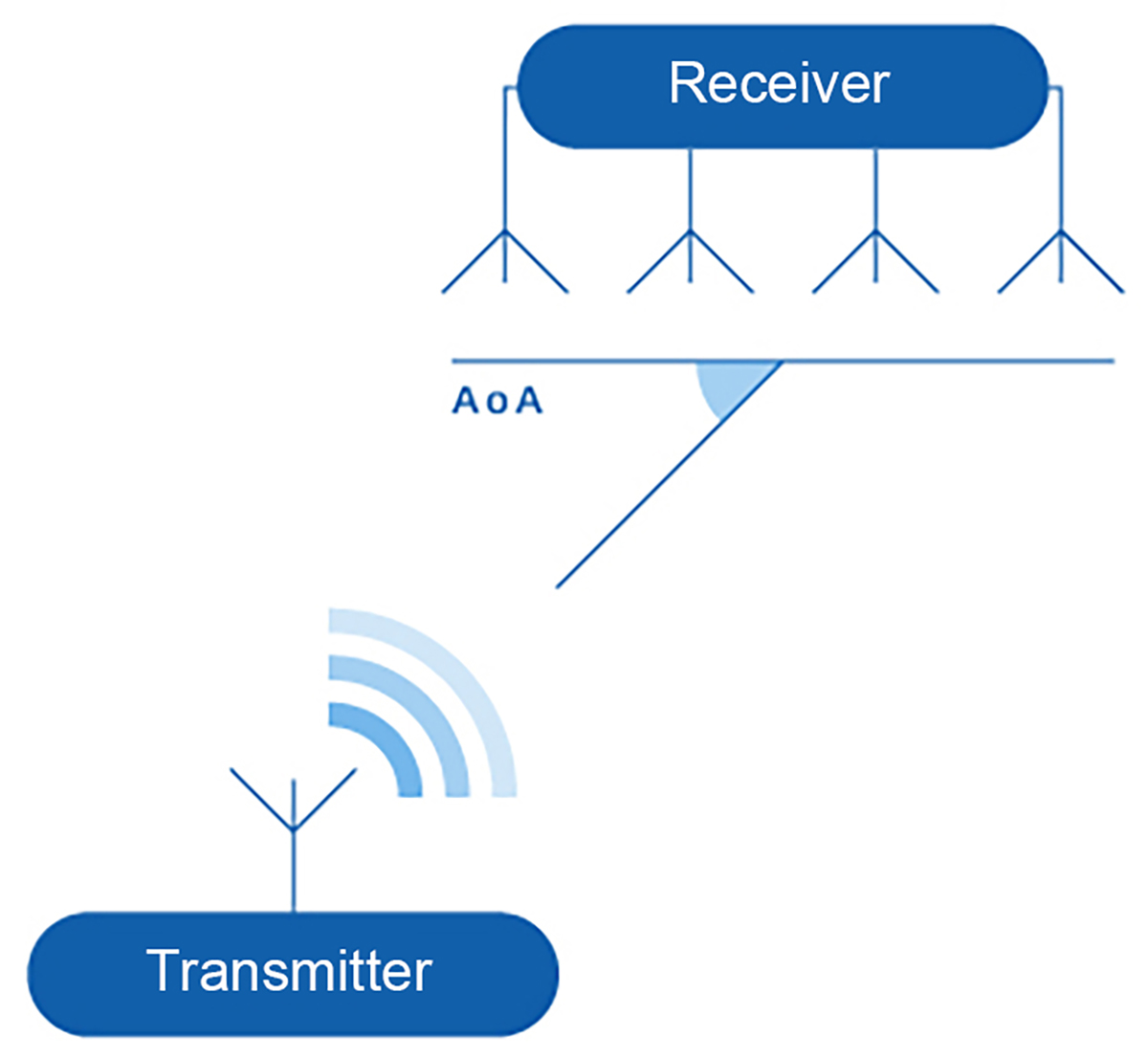
Figure 4. Bluetooth AOA Positioning
Obviously, to improve the precision level of positioning we need support of multiple Bluetooth base stations featuring AoA algorithm. So, in mid-tier models, car makers elect to deploy multi-point Bluetooth PEPS as illustrated in Figure 5, the exact number of base stations and layout pattern vary to some extent for different car models though.
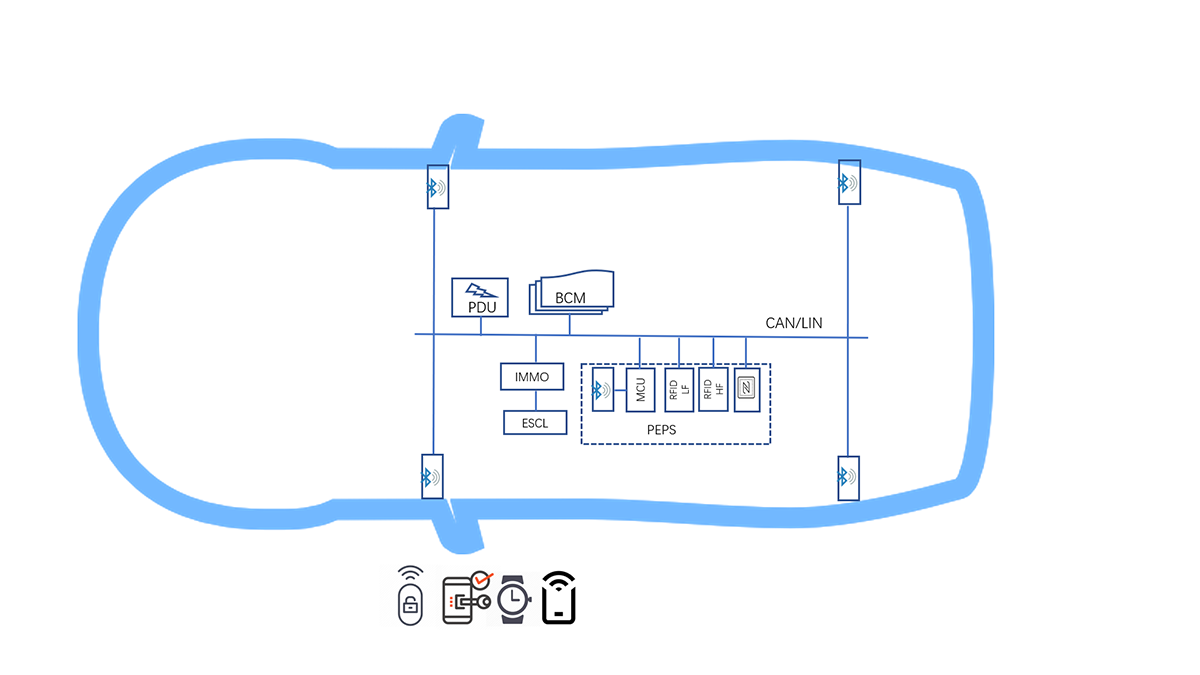
Figure 5. Mainstream Bluetooth PEPS Solution (AoA Positioning)
Most adopted SoCs in Bluetooth PEPS arena include TI CC2640, Silicon Labs EFR32BG22 and NXP KW36 etc.
Tomorrow: UWB is Promising
Time never ceases its pace, nor does innovation of PEPS. With its higher safety, faster response speed and centimeter-level positioning accuracy, UWB technology has increasingly attracted the attention of product innovation teams of car makers. In 2019, the Car Connectivity Consortium (CCC) listed UWB as the next-generation vehicle security access technology, and UWB began to be applied in cars.
In June 2020, IEEE updated UWB-related standards (802.15.4z) to enhance UWB security functions (at the PHY/RF level), further paving the way for UWB to enter the mainstream application market. In July 2021, the CCC Alliance officially released the CCC Digital Key 3.0 specification, which clearly proposes the combination of UWB and BLE (Bluetooth) wireless technology to enable passive keyless entry and engine start through compatible mobile devices.
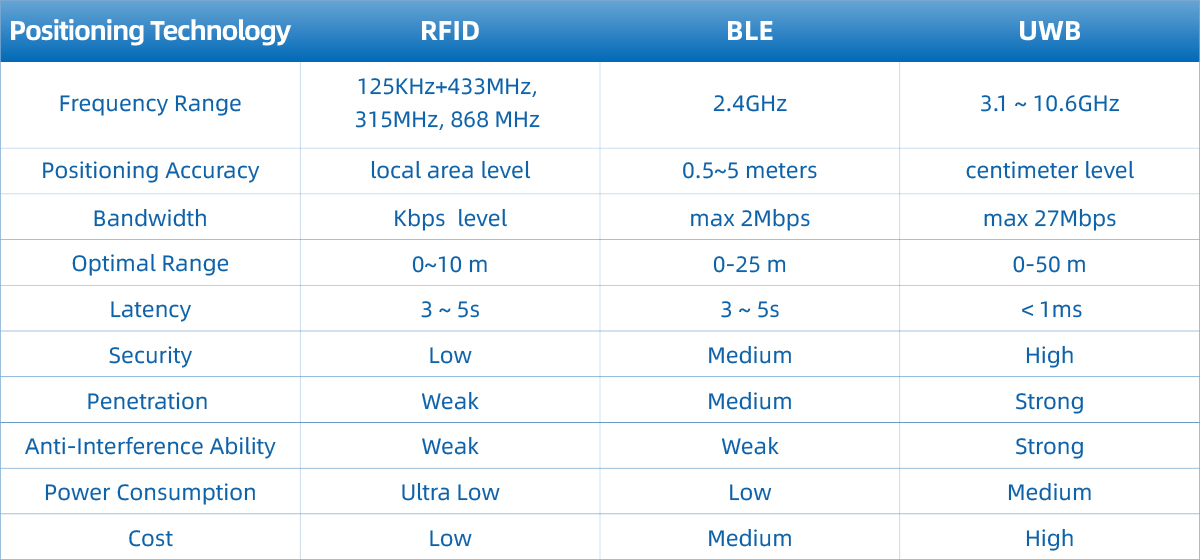
Table 1. Comparison of PEPS Positioning Technologies
Positioning Algorithms for UWB
There are three relatively mature positioning algorithms adopted for UWB solutions: TOA (Time of Arrival, time of arrival), TDOA (Time Difference of Arrival, time difference of arrival) and AOA (Angel of Arrival, angle of arrival). In the specific implementation process, a hybrid positioning scheme that integrates three positioning methods is generally used to achieve optimal positioning performance.
TOA uses a circular positioning method (see Figure 6) to achieve positioning by measuring the distance between a mobile terminal and three or more UWB base stations. The location of the mobile terminal can be determined by intersecting the three circles at one point. However, due to the existence of multipath, noise and other phenomena, the multi-circle cannot intersect or the intersection is not a point but an area, so in fact, TOA positioning is rarely used alone.
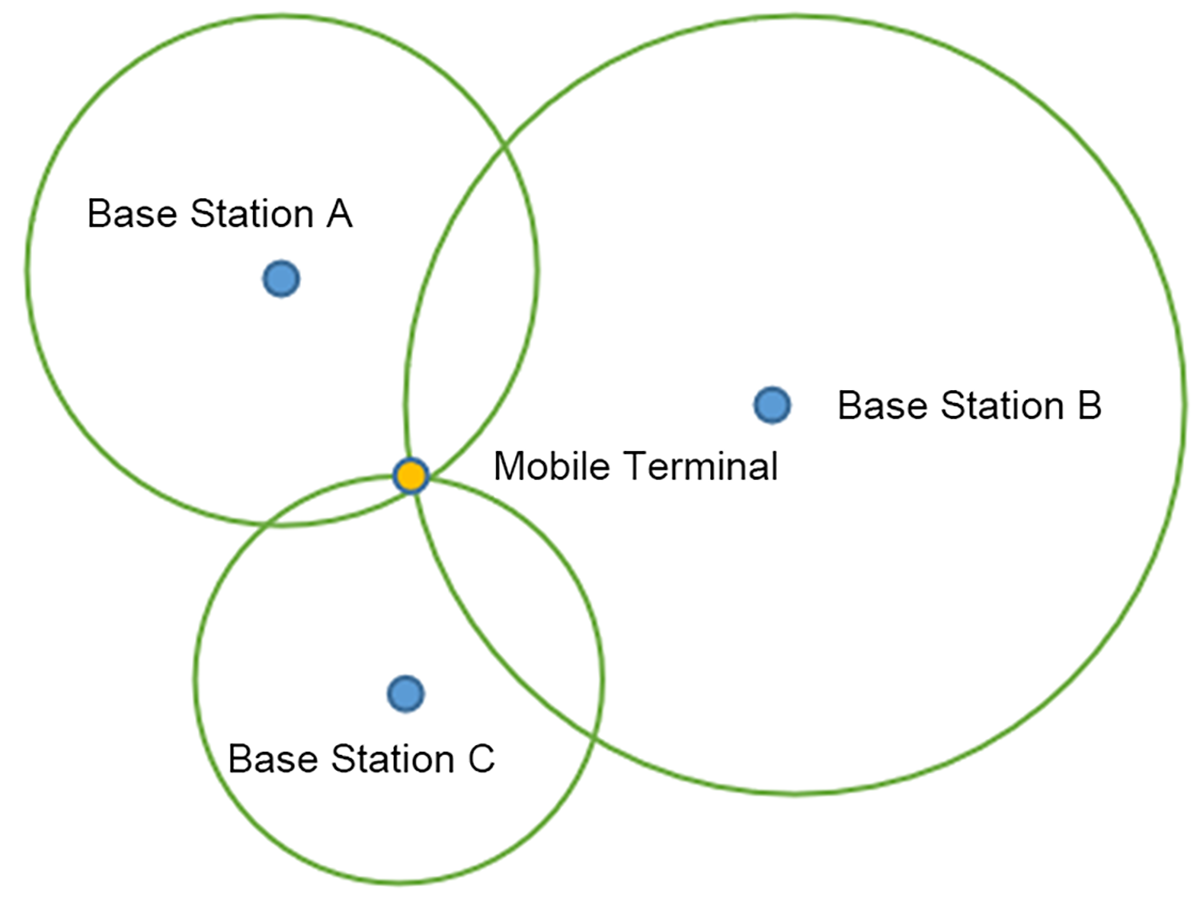
Figure 6. TOA Positioning Algorithm (Circular Positioning Method)
An improvement over TOA, TDOA conducts precise synchronization among base stations, which is easy to realize. No time synchronization between the mobile terminal and the base stations are concerned, as shown in Figure 7. First calculate the distance difference between the mobile terminal and base station A and one between it and base station B. The mobile terminal must be on a hyperbola with base station A and base station B as focuses. Another set of hyperbolas can be obtained by the distance differences between the mobile terminal and base station A and base station C, and the intersection of the hyperbolas is the position of the mobile terminal. In the range of vehicle space, the influence of multipath, noise, etc. can also be reduced by means of distance difference.
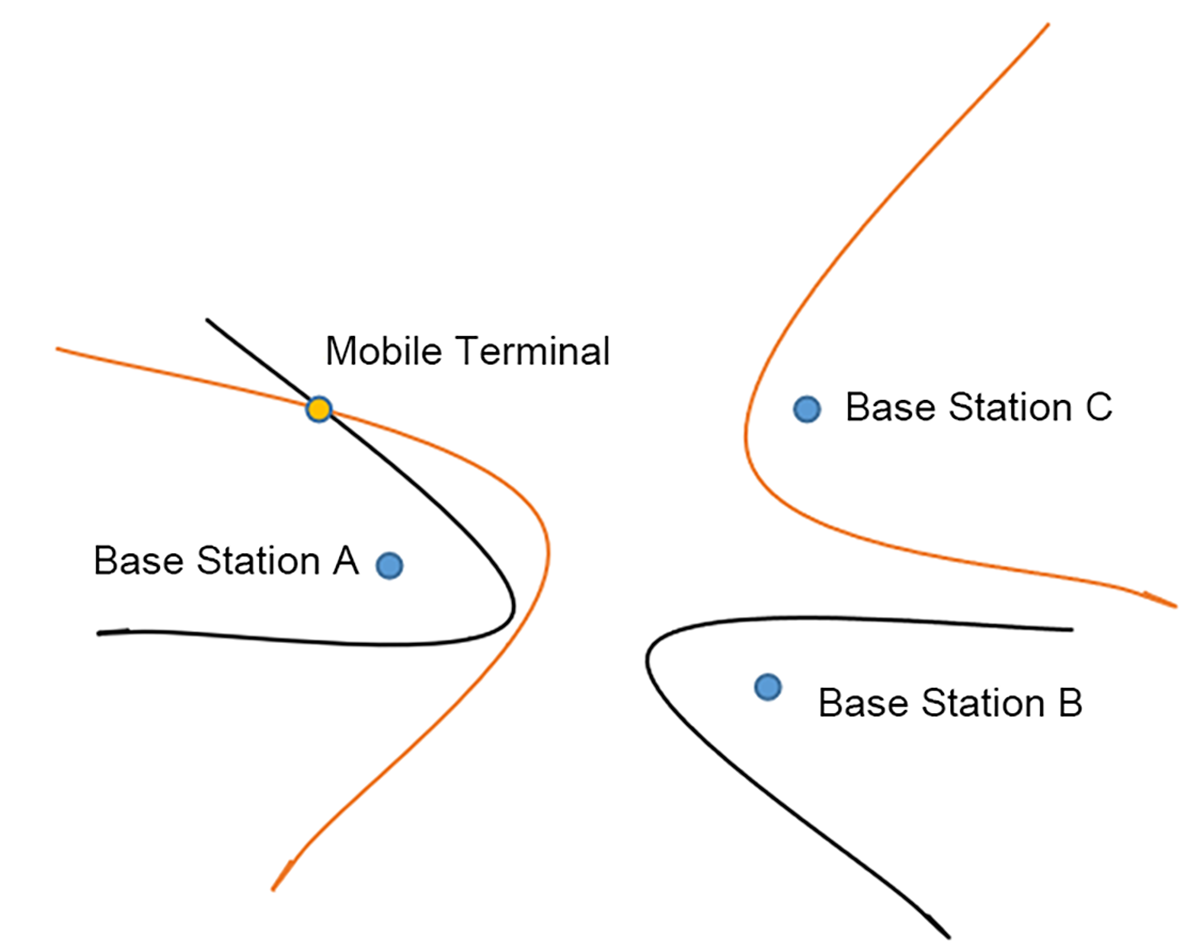
Figure 7 TDOA Positioning Algorithm
AOA positioning calculates the angle of arrival based on the principle of phase difference, and only needs two base stations to achieve positioning. Due to the issue of angular resolution, the positioning accuracy decreases with the increase of the distance from the base station, and is mostly used for positioning in short and medium distances.
UWB PEPS Scenario
When the car owner brings the smart key close to the vehicle, the vehicle BLE node can detect the BLE signal of the smart key at a distance of up to 80 meters. The vehicle BLE node wakes up the body domain controller, and the body domain controller controls the welcome light to slowly turn on, thus entering the welcome state. At the same time, the vehicle UWB node is awakened. When the distance between the smart key carried by the car owner and the car is less than 10m, the vehicle UWB node can accurately perceive the owner's position in real time with positioning algorithms. At this time, the owner can automatically unlock the door and open it simply by a pull operation. In addition, the car will also be equipped with the function of NFC (near field communication). In special cases such as the smart key is out of power, NFC can be used to unlock and start the vehicle. Its implementation architecture is shown in Figure 8.
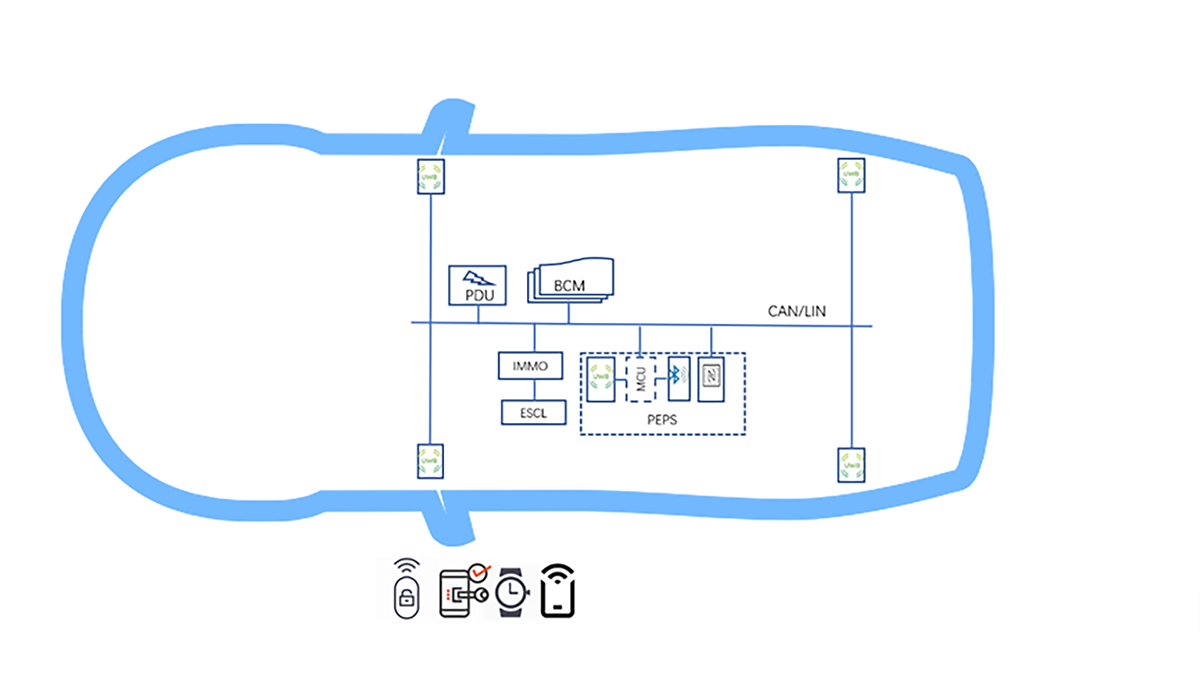
Figure 8. Implementation Architecture of UWB PEPS Specified by CCC 3.0
In the field of UWB chips, the currently recognized mature manufacturers are Apple, NXP Trimension and QORVO Decawave. Among their released ICs, only NXP Trimension NCJ29D5 meets the requirements of vehicle regulations.
Extension: Bio-Radar
The experience of UWB PEPS for drivers is both intimate and safe. However, do the passengers in the car feel same? Usually yes, but no in some special cases. Sometimes it is harsh for them. For instance, if the driver gets out of the car, the doors automatically lock. A baby or a sweety pet was accidentally left in the car. Should the car send alarm to the driver? Absolutely necessary! Fortunately, it can be well addressed by UWB.
As an ultra-wideband wireless carrier communication technology, UWB utilizes nanosecond non-sinusoidal narrow pulses to transmit data. This technology enables UWB to achieve extraordinary radar functions. Compared with ordinary radar, UWB radar has many advantages, such as low power consumption, millimeter-level resolution, strong penetration, strong anti-interference ability, and being suitable for short-range detection, etc. UWB is especially suitable for life detection as a bio-radar.
UWB bio-radar can remotely detect vital signs such as breathing and heartbeat of human or animals without hassle of any electrodes or sensors contacting the living body. It can not only help the PEPS system to prevent accidents of locking up people or animals in the car, but also detect the driver's physiological state, and issue reminders or even intervene in a timely manner when the driver is unwell in riding.
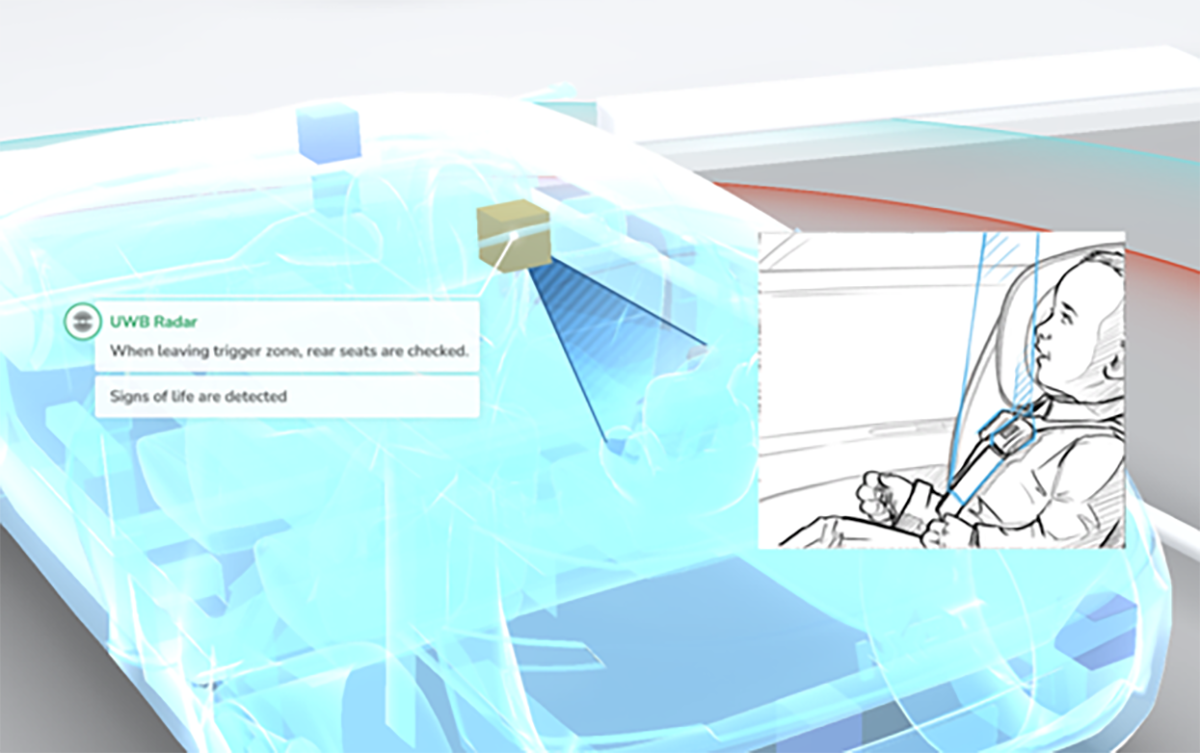
Figure 9. Life Detection with UWB Bio-Radar
Trunk: Kick-to-Open
In addition to in-vehicle life detection, based on UWB radar's feature of motion perception, UWB also has a clever application of stomping to open the trunk. When the driver's identity reaches the rear of the vehicle, the UWB radar can accurately detect the stomping action, thereby automatically opening the trunk of the vehicle.
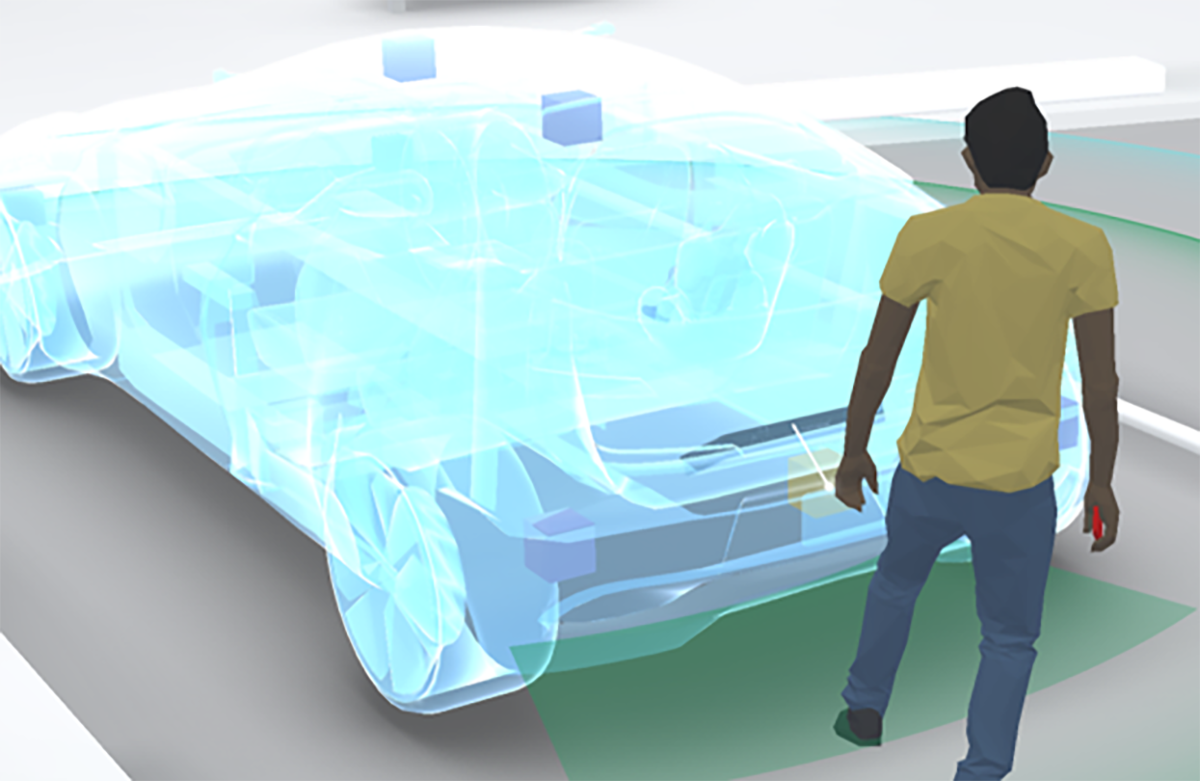
Figure 10. UWB Enables Kick-to-Open Solution
The two UWB radar functions described above, including UWB bio-radar and UWB kicking radar, do not require additional hardware, but are only implemented by reusing vehicle-side UWB hardware without adding additional hardware costs. We can also consider them as parts of future UWB PEPS functionality.
UWB Enabled Automated Valet Parking
AVP (Automated Valet Parking) is the autonomous valet parking function. It is known as the L4-level autonomous driving technology that provide the users "last mile freedom". It is currently the most promising autonomous driving application scenario for commercialization, as shown in Figure 11. Another huge benefit of implementing a PEPS experience with UWB is that it provides the necessary and sufficient conditions to implement AVP at the side of the car.
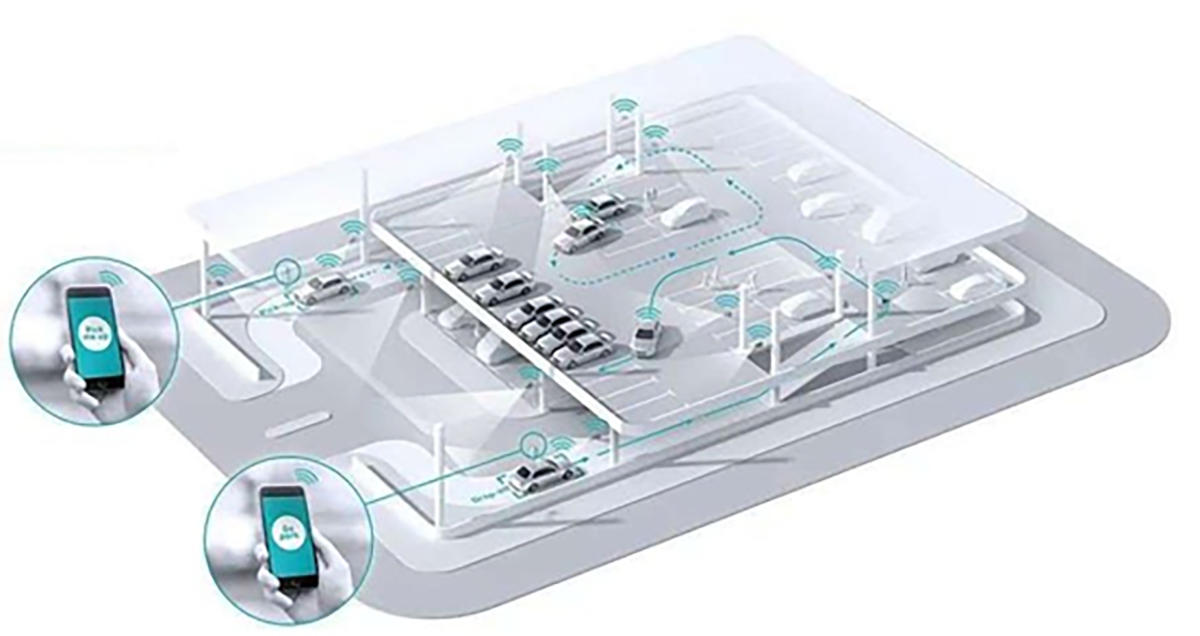
Figure 11 Automated Valet Parking System
Figure 12 shows a feasible vehicle-end UWB node layout scheme. A total of four UWB PEPS nodes are placed at the headlights and taillights, and a fifth UWB PEPS+AVP node is placed on the roof. The fifth node can receive both the UWB signal in the car and the UWB signal outside the car, and is also the key node to realize the AVP function.
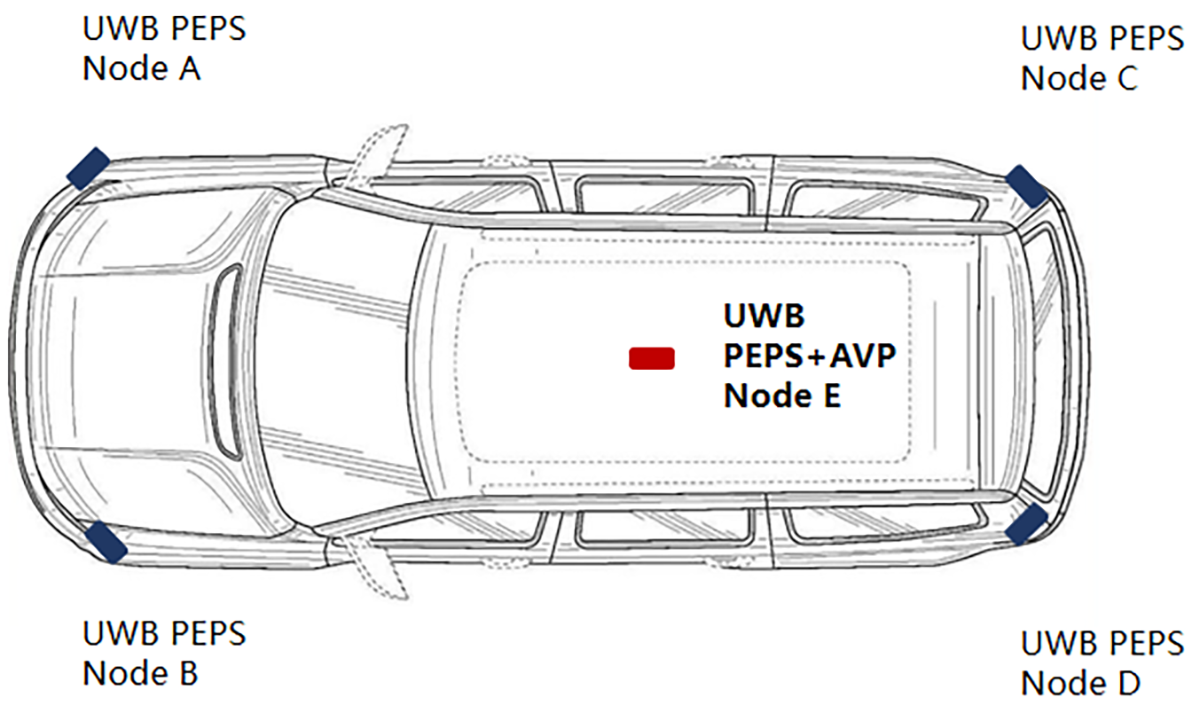
Figure 12 Architecture of PEPS + AVP
In PEPS mode, the fifth UWB node cooperates with the other four UWB nodes to complete the measurement of the position of the smart key, and sends the ranging information to the body domain controller (BCM) to complete the calculation of the position of the smart key, so as to decide the follow-up unlock and start operations.
When entering the AVP mode, the fifth node begins to continuously receive UWB positioning messages advertised by UWB nodes laid out in the parking lot. The vehicle-end UWB node sends the received positioning message to the intelligent driving domain controller, so as to realize coordinates calculation of the vehicle in the garage, and then transfer it to the planning control module for the realization of the AVP operations.
Conclusion
In the last twenty years, PEPS beat a path of solid growth. Since it is more and more popular among car makers, it will continue to usher in more innovation to improve the experience of car riders and security standard while the mankind is bracing more and more intelligent driving.
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
Tel : +86 (0)28-86925399
Email : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














